| Project | ||
| Home | ||
| News | ||
| Contributions | ||
| Forum | ||
| Subsystems | ||
| Overview | ||
| Pneumatics | ||
| Extension | ||
| Controller | ||
| Structure | ||
| Simulator | ||
| Graphics | ||
| Driver | ||
| Files | ||
| Download | ||
| Upload | ||
| Miscellaneous | ||
| Links | ||
| Legal stuff | ||
Full Motion Flight Simulation Platform
Project discontinued!Please see my latest full motion simulator project.
As some of you may already have noticed, there hasn't been much going on with this project in the past years. Well, since the pneumatic approach didn't work out the way I had hoped, and other things came up in the meantime, I haven't worked on the platform project any more.
Nevertheless I decided to leave the existing pages in place, just in case
they are useful to anybody...
PC flight simulators are fun to use, but they have one major
disadvantage: they don't give you any physical feedback regarding
the motion of the simulated aircraft. This often makes flying the virtual
plane very difficult. After having had the opportunity of flying a real
Cessna 180 in summer 1997 (where I was even allowed to do a few turns!)
I realized that a simulated flight must give some physical feedback to come
anywhere near to the real thing.
Commercial flight simulators are based on a 6 degree of freedom (6-DOF) full motion platform. Special software algorithms have been designed to convert the changes in the motion of the simulated aircraft into "motion cues", which together with the visual sensation of the simulated view from the cockpit window make the pilot believe he is sitting in a real aircraft.
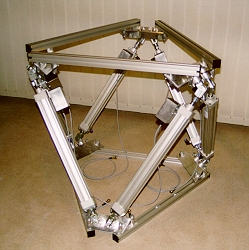
Typically such a platform is driven by hydraulic cylinders, which are messy (leaking oil), dangerous (very high pressure) and expensive (around US$50,000.- for a small platform). Therefore I came up with the idea of building a 6-DOF platform using pneumatic cylinders, as shown in the picture below. Pneumatics are in no way messy (all that can leak is air), the pressure is by far not as high as with hydraulics (which is ok for a small platform that only has to carry one person, not a complete aircraft cockpit), and it costs a lot less than a hydraulic platform (at this point I have spent around US$2,000.- for the hardware).
Project goal
This project is completely non-commercial. Any ideas contributed to this project shall be published in this place on the web. Once the platform works, a complete set of schematics and plans shall be published here, which allows anybody who wishes to do so to build their own full motion platform.